AVL树是由G. M. Adelson-Velsky和E. M. Landis与1962年发明的一种平衡二叉搜索树,并以他们名字的首字母命名。通过合理设定适度平衡的标准,并借助以上等价变换,AVL树可以实现近乎理想的平衡。在渐进意义下,AVL树始终将高度控制在$O(\log n)$以内,从而保证每次查找,插入或删除操作,均可在$O(\log n)$的时间内完成。
1.定义及性质
任一节点v的平衡因子(balance factor)定义为“其左、右子树的高度差”,即:
balFac(v) = height( lc(v) ) - height( rc(v) )
在AVL树中,任意节点的平衡因子的绝对值不超过1,即|balFac(v)| $\le$ 1,注意空树高度取-1,单节点子树(叶节点)高度取0。AVL树未必理想平衡,但必然适度平衡。
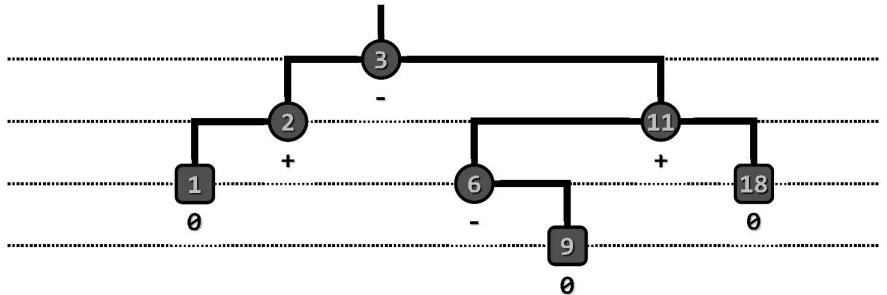
适度平衡要求当节点数固定为n时,树的高度渐进地不超过$O(\log n)$。欲证明AVL树满足适度平衡条件,可转化为证明当树的高度固定时,树中的节点数不会太少。考虑高度为h的所有AVL树,并取S为其中节点数最少的一棵,如下图,$S_L$和$S_R$分别为$S$的左右子树,$S_L$和$S_R$也都是AVL树,而且高度不超过h-1,又因为$S$的节点数最少,所以$S_L$和$S_R$中一个高度为h-1,一个高度为h-2。从而可以得到以下递推关系,并加以整理得到fibonacci数列的形式:
从高度为0,1,2的树的节点数可以推出节点数$S(h)$和fibonacci数的关系,即$S(h)=fib(h+3)$。
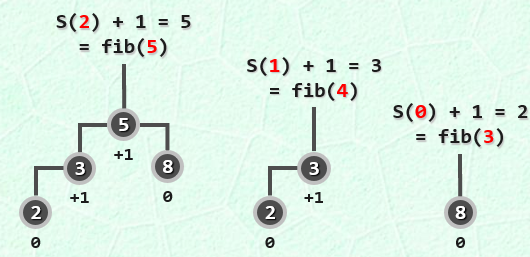
可得对于高度为h的AVL数,节点数n满足$n\ge \Omega(\Phi ^h)$,因此对于节点数固定为n的AVL数,其高度h满足$h\le O(\log n)$。
基于BST模板类,可直接派生出AVL模板类,并根据AVL树的重平衡规则与算法,重写了insert()和remove()接口。另外,为简化对节点平衡性的判断,算法实现时可借用宏定义。
1 |
|
按照BST规则插入或删除节点之后,AVL中节点的高度可能会发生变化,平衡性可能会破坏,以致于不再满足AVL树的条件。如此因节点x的插入或删除而暂时失衡的节点,构成失衡的节点集,记作UT(x)。
为了恢复AVL的平衡性需要借助等价变换,它有以下优势:
- 局部性:所有的旋转都在局部进行 //每行只需$O(1)$时间
- 快速性:在每一深度只需检查并旋转至多一次 //共$O(\log n)$次
2.节点插入
新引入节点x后,UT(x)中的节点都是x的祖先,且高度不低于x的祖父。将其中的最深者记为g(x),在 x与g(x)的通路上,设p为g(x)的孩子,v为p的孩子,既然g(x)不低于x的祖父,则p必是x的真祖先。
首先需要找到如上定义的g(x),可以从x出发沿parent指针逐层上行并核对平衡因此,首次遇到的失衡祖先即为g(x),既然原树是平衡的,故这一过程需要$O(\log n)$。既然g(x)是因x的引入而失衡,则p和v的高度均不低于其各自的兄弟,因此借助宏定义的tallerChild(),即可反过来由g(x)找到p和v。
1 |
|
以下根据节点g(x)、p和v之间具体的联接方向,采用不同的局部调整方案。
单旋:
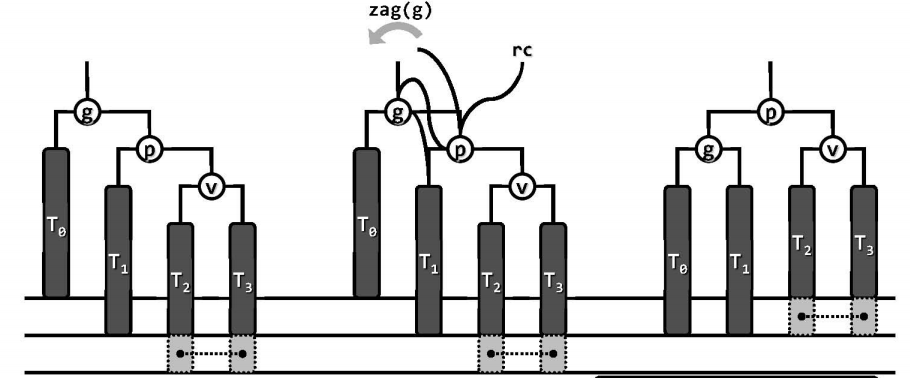
当g、p和v在同一侧时,如下图都在右侧(可称为zag-zag,对称地若都在左侧可称为zig-zig),在$T_2$或者$T_3$处插入新的节点,插入的节点在底部以浅灰色表示,g的平衡因子由原来的-1变为-2,失衡。这种情况只需g经单次旋转zag(g(x)),图中的子树高度复原,更高的祖先也比平衡,全树复衡。
双旋:
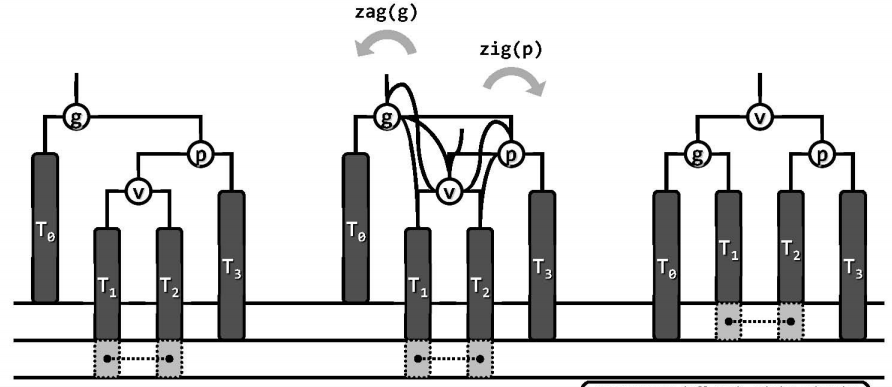
当g、p和v不在同一侧时,如下图中p是g的右孩子,v是p的左孩子(可称为zag-zig,对称地若p是g的左孩子,v是p的右孩子可称为zig-zag),在$T_1$或者$T_2$处插入新的节点,插入新节点后,g的平衡因子由原来的-1变为-2,失衡。这种情况需要先做顺时针旋转zig(p),在做逆时针旋转zag(g),得到一棵平衡的等价二叉树。
无论单旋还是双旋,经局部调整之后,不仅g(x)能够重获平衡,而且局部子树的高度也必将平衡。这就意味着,g(x)以上所有祖先的平衡因子亦将统一地复原,即在AVL树中插入新节点后,仅需要至多两次旋转,即可使整数恢复平衡。
AVL树插入节点的代码实现:
1 | template <typename T> BinNodePosi(T) AVL<T>::insert ( const T& e ) { //将关键码e插入AVL树中 |
效率:该算法首先按照二叉搜索树的常规算法在$O(\log n)$时间内插入新节点x,既然原树是平衡的,故至多坚持$O(\log n)$个节点即可确定g(x),而至多旋转两次即可使局部乃至全树恢复平衡,因此AVL树的节点插入操作可以在$O(\log n)$时间内完成。
3.节点删除
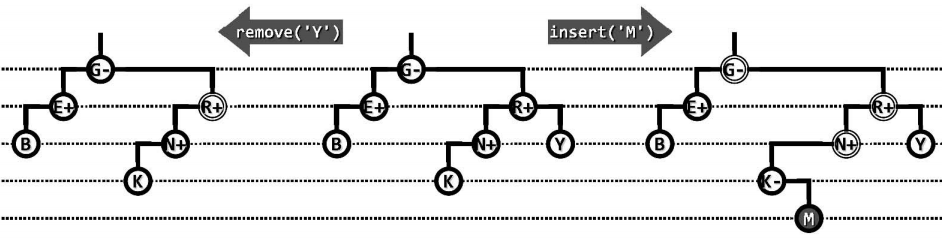
与插入操作不同的是,在删除节点x后,以及在随后的调整过程中,失衡节点集UT(x)始终至多只含一个节点。若该节点g(x)存在,其高度必与失衡前相同,而且g(x)有可能就是x的父亲。
与插入操作同理,从_hot节点出发沿parent指针上行经过$O(\log n)$时间即可确定g(x)位置,作为失衡节点的g(x)在不包含x的一侧必有一个非空孩子p,且p的高度至少为1。选取p的孩子节点v时可按以下规则:若两个孩子不等高,则v取其中的更高者;若两个孩子等高,则取与p同向者。
以下不妨假设失衡后g(x)的平衡因子为+2,根据g、p和v的关系,通过等价变换,同样可以使得这一局部恢复平衡。
单旋:
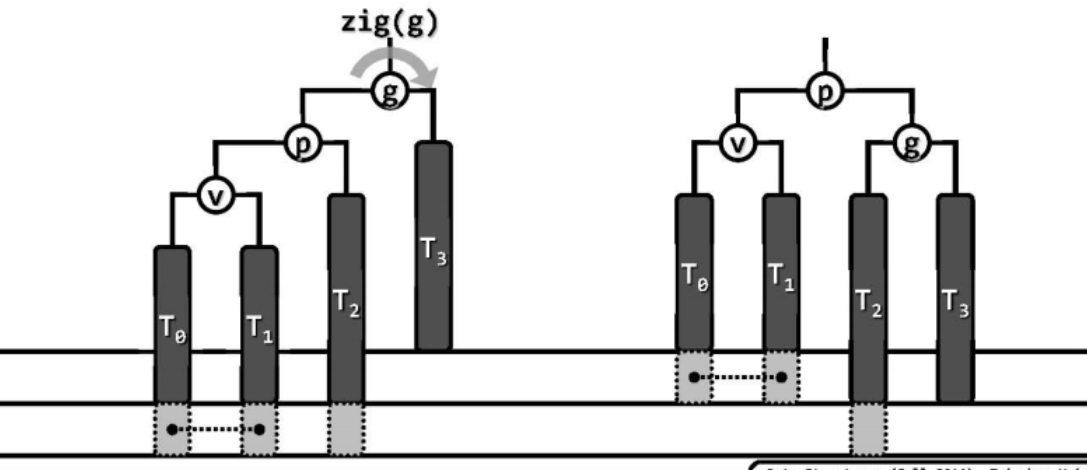
如下图g、p和v在同一侧,在$T_3$中删除节点使得节点g(x)失衡,通过一次顺时针旋转zig( g )即可恢复局部的平衡。这里约定图中以虚线连接的灰色方块所对应的节点,不能同时为空;$T_2$底部的灰色方块所对应的节点,可以为空,也可以非空。
双旋:
如下图g、p和v不在同一侧,在$T_3$中删除节点使得节点g(x)失衡,这种情况需要先做一次逆时针旋转zag( p ),再做一次顺时针旋转zig( g ),即可恢复局部平衡。
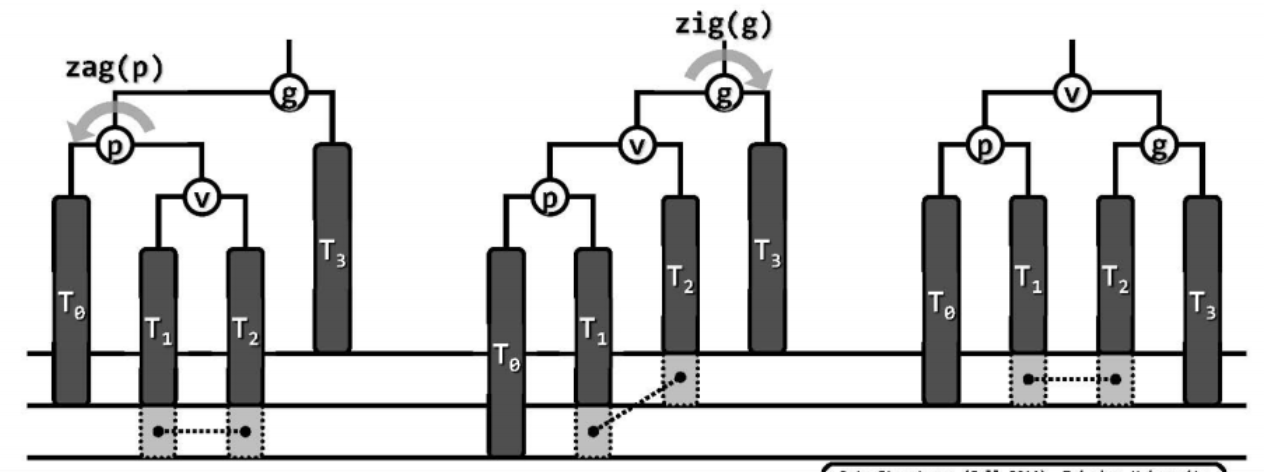
失衡传播:
经过旋转操作使局部恢复平衡后,子树的高度未必复原,如上图中子树的高度降低,因此其更高的祖先可能失衡。在删除节点之后的调整过程中,这种由于低层失衡节点的重平衡而致使其更高层祖先失衡的现象,称作“失衡传播”。
失衡传播的方向必然是自底而上的,因而不致于影响到狗带节点。在此过程中的任一时刻,至多只有一个失衡的节点;高层的某一节点由平衡转为失衡,只能发生在下层失衡节点恢复平衡之后。因此可沿parent指针逐层遍历所有祖先,每找到一个失衡的祖先节点,即可套用以上方法式使之恢复平衡。
AVL树删除节点的代码实现:
1 | template <typename T> bool AVL<T>::remove ( const T& e ) { //从AVL树中删除关键码e |
效率:较之插入操作,删除操作可能需要在重平衡上要多花费 一些时间,既然需要做重平衡的节点都是x的祖先,故重平衡过程累计只需$O(\log n)$时间,因此AVL树的节点删除操作总体的时间复杂度依然是$O(\log n)$。
4.统一重平衡算法
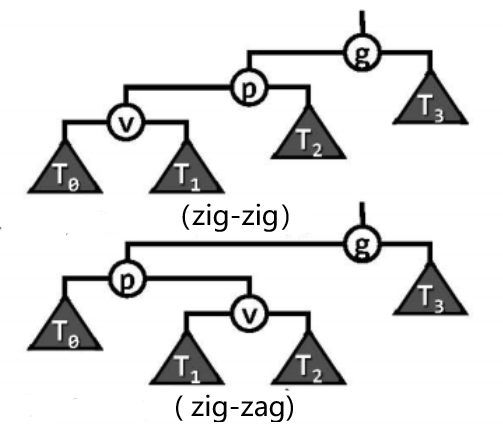
这一节主要解决如何实现第2、3节中插入/删除操作实现代码中的重平衡算法rotateAt(),上述重平衡的方法实质上可以转换成一种更简明的方法,无论是插入或删除操作,都要从刚发生修改的位置x出发向上直到遇到最低的失衡节点g(x),在g(x)更高一侧的子树中,其孩子节点p和孙子节点v必然存在,按中序遍历次序,将其重命名为:$a < b < c$。它们总共拥有互不相交的四棵(可能为空)子树,按中序遍历序列,将其重命中为:$T_0<T_1<T_2<T_3$。
将原先以g为根的子树S,替换为一棵新子树S’:

等价变换后得到的新子树也是一棵AVL树,保持中序遍历次序:$T_0<a<T_1<b<T_2<c<T_3$。实际上,这一理解涵盖了此前两节所有的单旋和双旋情况(就相当于不进行“旋转”操作,而是直接将节点和子树“拆开”来按中序遍历次序保持不变重新拼到一起,使之恢复平衡)。相应的重构过程,仅涉及局部的三个节点及四棵子树,故称作“ 3 + 4 ”重构。
这种重构算法可以实现为下面的代码:
1 | /********************************************************************************** |
根据g、p和v之间的联接关系,可以将g、p和v,以及它们的四棵子树与$a,b,c,T_0,T_1,T_2.T_3$对应起来,如” zig-zig “的联接方式,对应的是connect34(v, p, g, v->lc, v->rc, p->rc, g->rc);而” zig-zag “的联接方式,对应的是connect34(p, v, g, p->lc, v->lc, v->rc, g->rc),总之就是按照中序遍历次序代入就可。
利用connect34()算法,即可视不同情况,按如下的代码实现重平衡算法rotateAt(),rotateAt()算法的复杂度依然是$O(1)$。
1 | /********************************************************************************** |
对AVL树的综合评价:
优点:无论查找、插入或删除,最坏情况下的复杂度均为$O(\log n)$,需要$O(n)$的存储空间。
缺点:需要借助高度或平衡因子,为此需要改造元素结构,或额外封装。实测复杂度与理论值尚有差距,删除操作后,最多需要重平衡$\Omega(\log n)$次,若需频繁地进行插入/删除操作,未免得不偿失。单次动态调整后,全树的拓扑结构的变化量可能高达$\Omega(\log n)$,我们希望将它们控制到更低,比如在下一章将要介绍的红黑树,则可以将这个变化量严格地控制在每次不超过常数无,论对于插入操作还是删除操作都是如此。