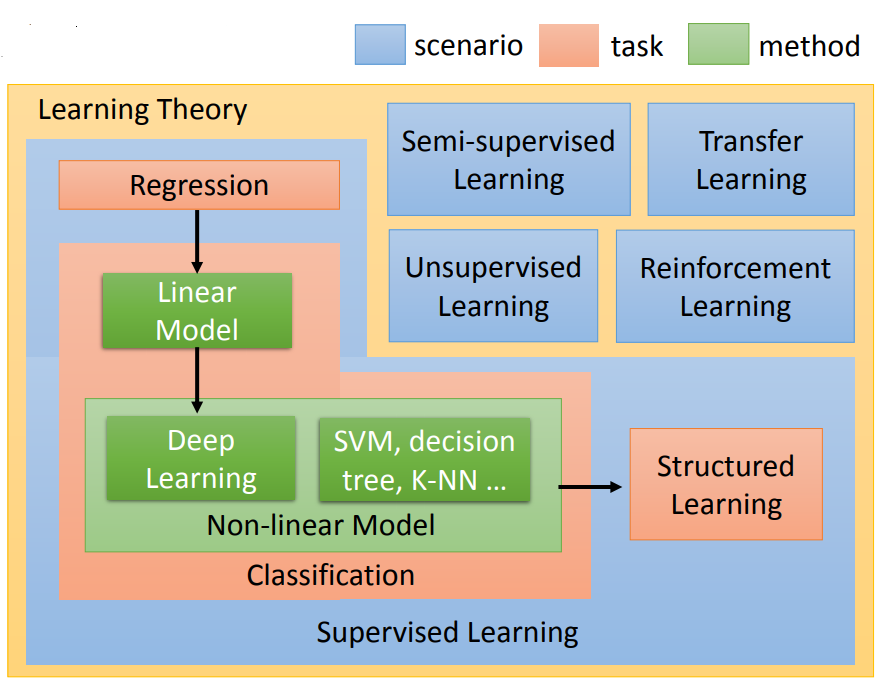
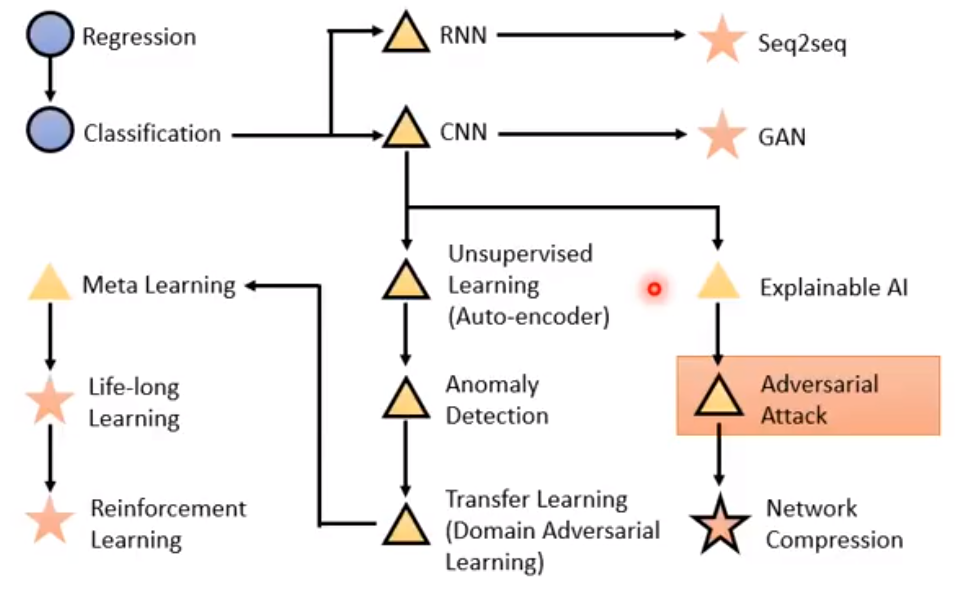
这周开始学李宏毅老师的Machine Learning 2020的课程了,从第一节课的课程概述来看,这门课除了会介绍传统的Machine Learning算法外,还会介绍很多Deep Learning的内容,时长也是非常感人(ㄒoㄒ),希望自己能坚持学下去吧。
前面几节课(p3-p7)分别讲了回归 Regression,误差来源 Where does the error come from,梯度下降 Gradient Descent,老师用的预测宝可梦pokemon的CP值的例子还是蛮有趣的hhh。这部分的理论内容自己是比较熟悉,也有之前做的纸质笔记,在这里就不详细展开了,这里主要写一下使用Gradient Descent的Tips,以及其背后的Theory。
1. Gradient Descent Tips
1.1.Tip 1: Tuning your learning rates
gradient descent过程中,影响结果的一个很关键的因素就是learning rate的大小
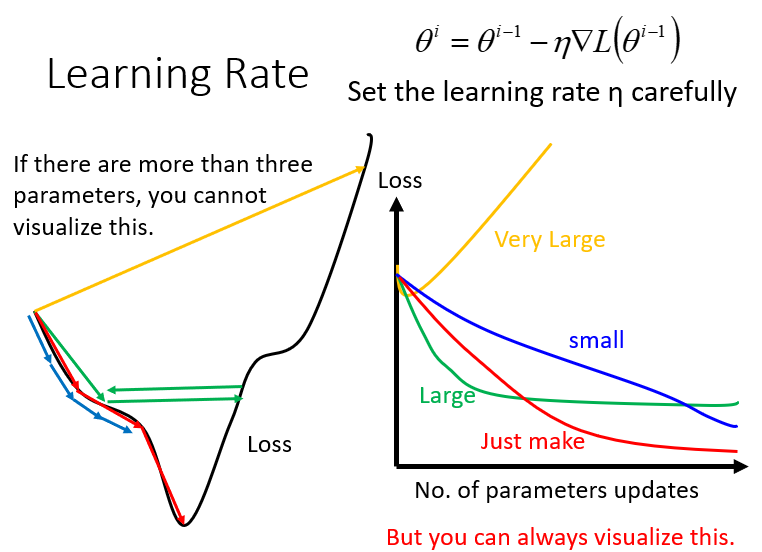
当参数有很多个的时候(>3),其实我们很难做到将loss随每个参数的变化可视化出来(因为最多只能可视化出三维的图像,也就只能可视化三维参数),但是我们可以把update的次数作为唯一的一个参数,将loss随着update的增加而变化的趋势给可视化出来(上图右半部分)
所以做gradient descent时可以把不同的learning rate下,loss随update次数的变化曲线给可视化出来,它可以提醒你该如何调整当前的learning rate的大小,直到出现稳定下降的曲线
Adaptive Learning rates
显然这样手动地去调整learning rates很麻烦,因此我们需要有一些自动调整learning rates的方法。最基本、最简单的大原则是:learning rate通常是随着参数的update越来越小的。可以这样理解:在起始点的时候,通常是离最低点是比较远的,这时候步伐就要跨大一点;而经过几次update以后,会比较靠近目标,这时候就应该减小learning rate,让它能够收敛在最低点的地方。如可以设置到了第t次update,$\eta^t=\eta/ \sqrt{t+1}$。
这种方法使所有参数以同样的方式同样的learning rate进行update,而最好的状况是每个参数都给他不同的learning rate去update
Adagrad
Adagrad就是将不同参数的learning rate分开考虑的一种算法(adagrad算法update到后面速度会越来越慢,当然这只是adaptive算法中最简单的一种)。
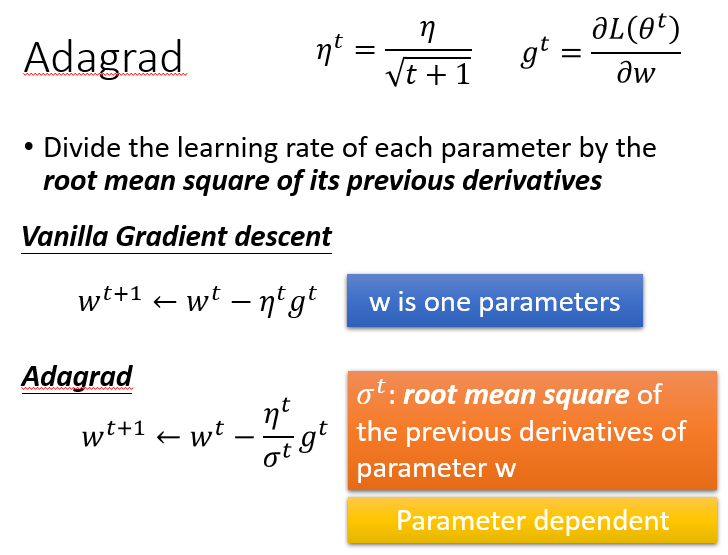
这里的$w$是function中的某个参数,$t$表示第$t$次update,$g^t$表示Loss对$w$的偏微分,而$\sigma^t$是之前所有Loss对$w$偏微分的均方根 root mean square这个值对每一个参数来说都是不一样的。
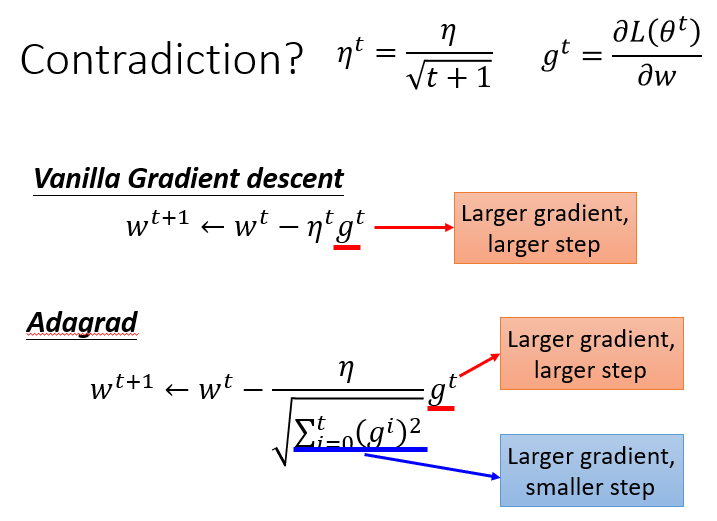
由于$\eta^t$和$\sigma^t$中都有一个$\sqrt{\frac{1}{1+t}}$的因子,两者相消,即可得到Adagrad的最终表达式:
对Adagrad中的contradiction的解释
Adagrad的表达式$w^{t+1}=w^t-\frac{\eta}{\sqrt{\sum\limits_{i=0}^t(g^i)^2}}\cdot g^t$里面有一件很矛盾的事情:我们在做gradient descent的时候,希望的是当梯度值即微分值$g^t$越大的时候(此时斜率越大,还没有接近最低点)更新的步伐要更大一些,但是Adagrad的表达式中,分母表示梯度越大步伐越大,分子却表示梯度越大步伐越小,两者似乎相互矛盾。
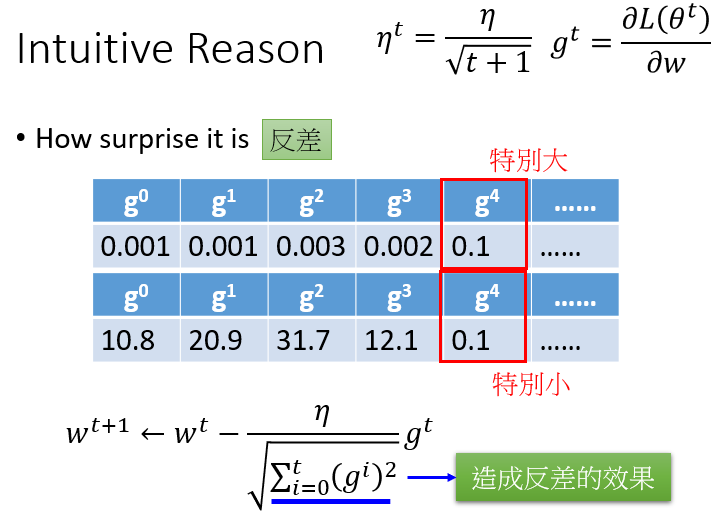
在一些paper里是这样解释的:Adagrad要考虑的是,这个gradient有多surprise,即反差有多大,假设t=4的时候$g^4$与前面的gradient反差特别大,那么$g^t$与$\sqrt{\frac{1}{t+1}\sum\limits_{i=0}^t(g^i)^2}$之间的大小反差就会比较大,它们的商就会把这一反差效果体现出来。
而且需要注意的是:gradient越大,离最低点越远,这个有点直观的想法在有多个参数的情况下是不一定成立的。如下图所示,$w_1$和$w_2$分别是loss function的两个参数,loss的值投影到该平面中以颜色深度表示大小,分别在$w_2$和$w_1$处垂直切一刀(这样就只有另一个参数的gradient会变化),对应的情况为右边的两条曲线,可以看出,比起a点,c点距离最低点更近,但是它的gradient却越大。
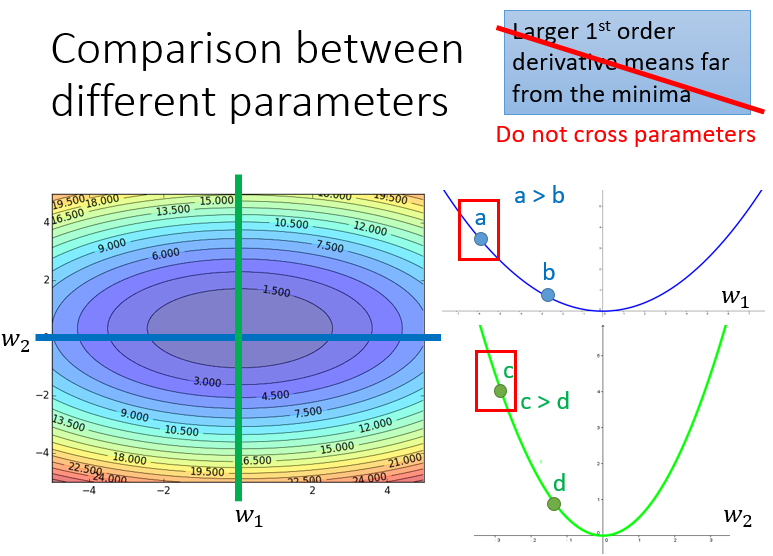
考虑一个简单的情况,对于一个二次函数$y=ax^2+bx+c$来说,最小值点的$x=-\frac{b}{2a}$,而对于任意一点$x_0$,它迈出最好的步伐长度是$|x_0+\frac{b}{2a}|=|\frac{2ax_0+b}{2a}|$(这样就一步迈到最小值点了),联系该函数的一阶和二阶导数$y’=2ax+b$、$y’’=2a$,可以发现the best step 就是 $|\frac{y’}{y’’}|$,即|一阶导数|/|二阶导数|,可见best step不仅跟一阶导数(gradient)有关,还跟二阶导数有关,用这个best step可以来反映Loss Function上一点到最低点的距离。
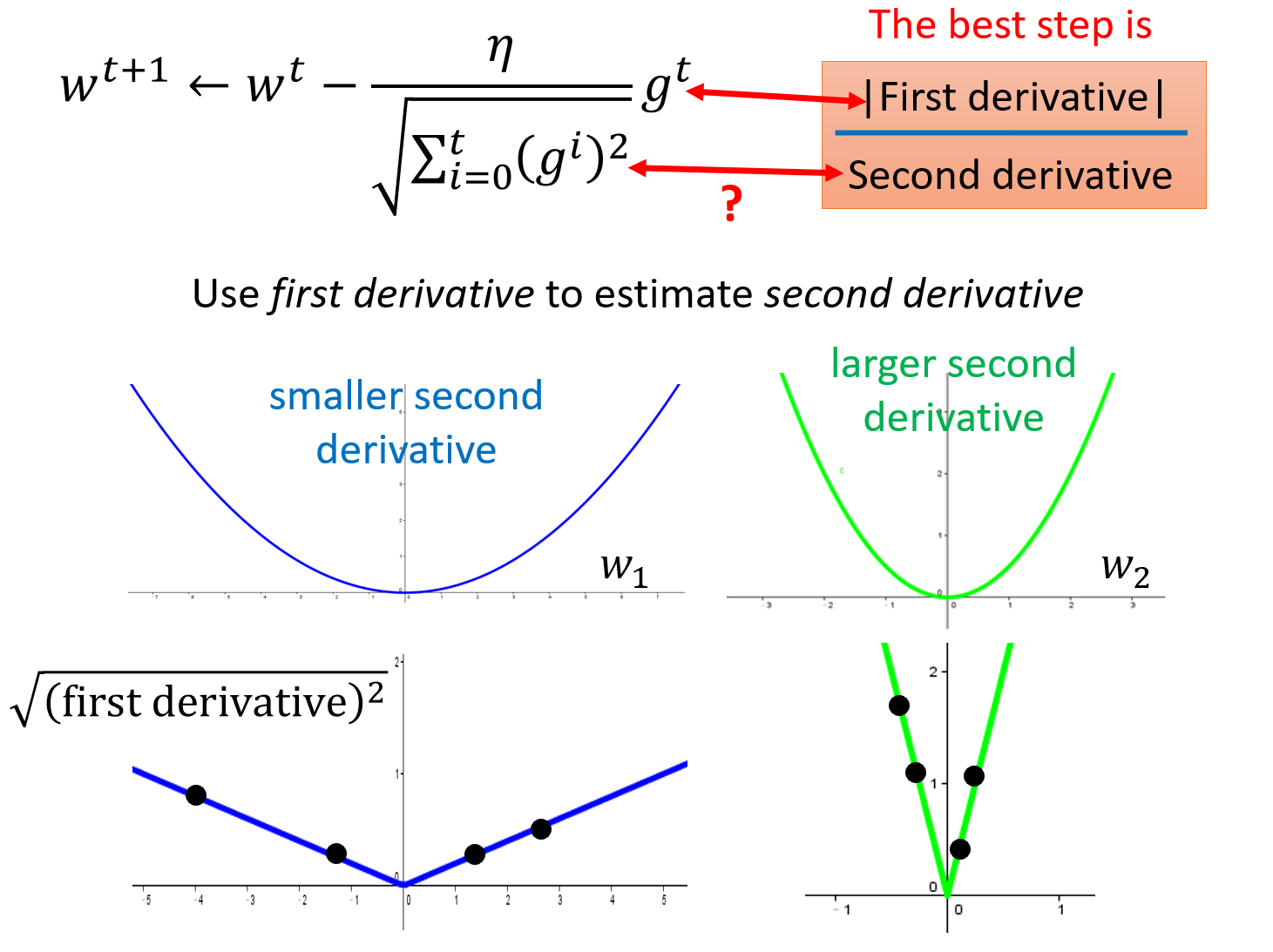
再来回顾Adagrad的表达式:
其中,$g^t$是一次微分,而分母中的$\sqrt{\sum\limits_{i=0}^t(g^i)^2}$则反映了二次微分的大小。Adagrad中用root mean square of the previous derivatives of parameter w来近似二次微分的大小,避免引入额外的计算量。
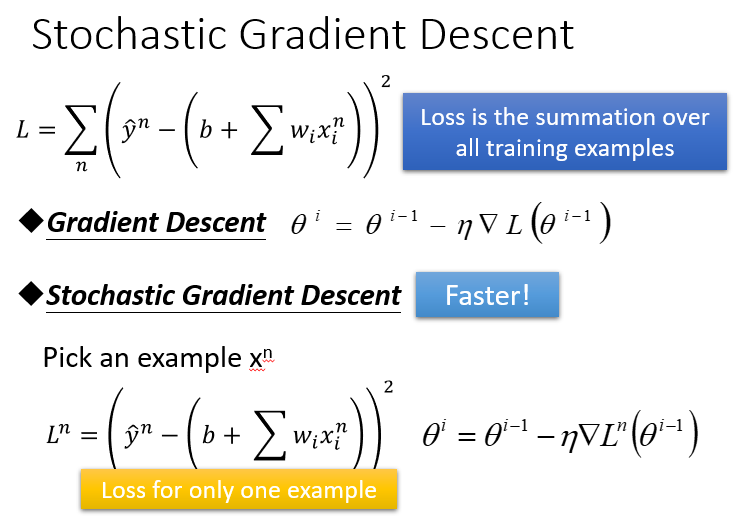
1.2.Tip 2: Stochastic Gradient Descent
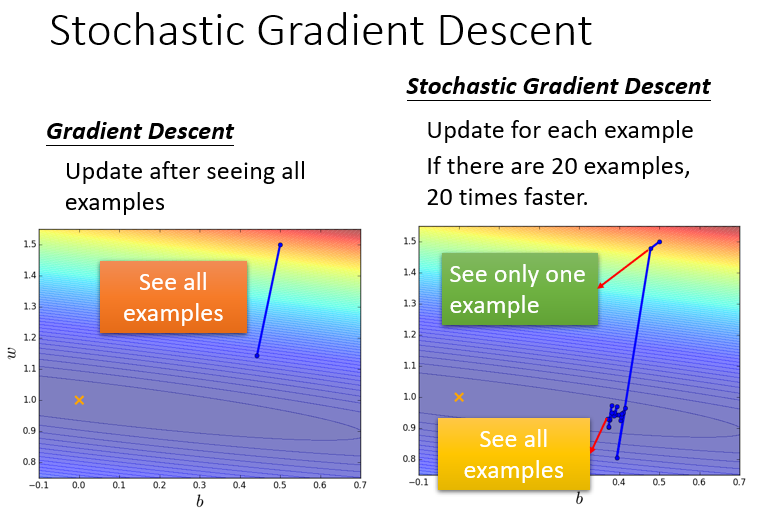
随机梯度下降 Stochastic Gradient Descent的方法可以让训练更快速,传统的gradient descent的思路是遍历所有的样本点之后再构建loss function,然后去update参数;而stochastic gradient descent的做法是,看到一个样本点就update一次,因此它的loss function不是所有样本点的error平方和,而是这个随机样本点的error平方。
Stochastic Gradient Descent与传统Gradient Descent的效果对比如下:
1.3.Tip 3: Feature Scaling
特征缩放Feature Scaling,当多个特征的尺度很不一样时,最好将这些不同feature的范围缩放成一样的。
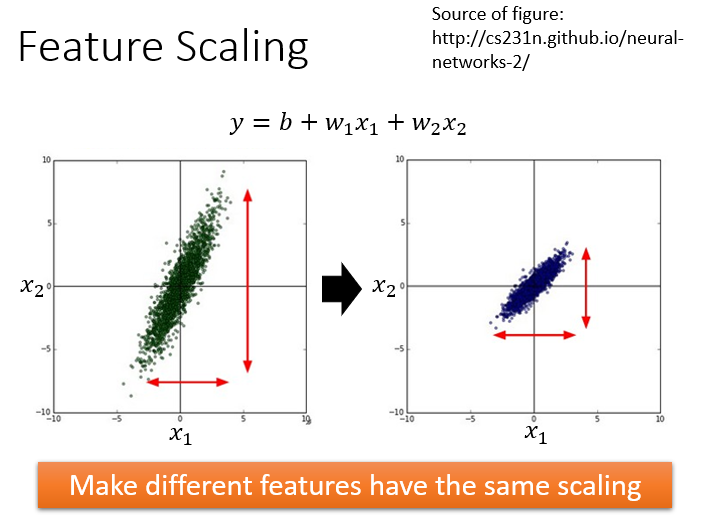
举个例子来解释为什么需要做feature scaling,$y=b+w_1x_1+w_2x_2$,假设$x_1$的值都是很小的,比如1,2…;$x_2$的值都是很大的,比如100,200…。此时去画出loss的error surface,如果对$w_1$和$w_2$都做一个同样的变动$\Delta w$,那么$w_1$的变化对$y$的影响是比较小的,而$w_2$的变化对$y$的影响是比较大的。
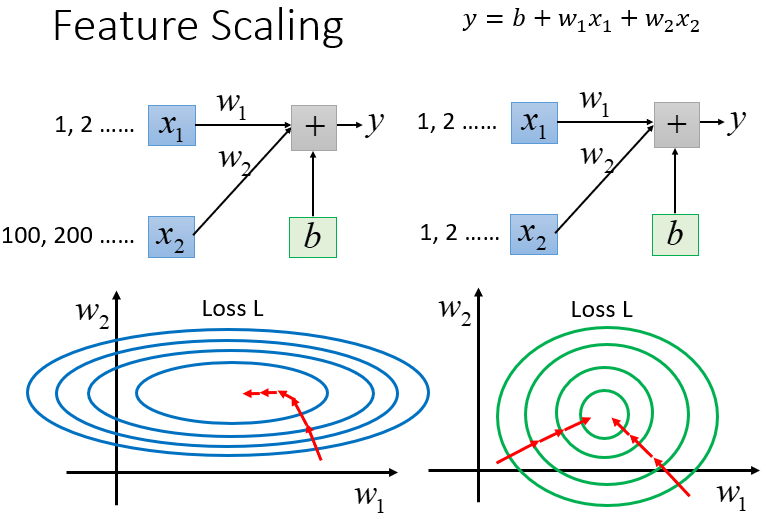
左边的error surface表示,w1对y的影响比较小,所以w1对loss是有比较小的偏微分的,因此在w1的方向上图像是比较平滑的;w2对y的影响比较大,所以w2对loss的影响比较大,因此在w2的方向上图像是比较sharp的。如果x1和x2的的scale是接近的,那么w1和w2对loss就会有差不多的影响力,loss的图像接近于圆形,那这样做对gradient descent有什么好处呢?
对Gradient Descent的帮助
之前我们做的demo已经表明了,对于这种长椭圆形的error surface,如果不使用Adagrad之类的方法,是很难搞定它的,因为在像w1和w2这样不同的参数方向上,会需要不同的learning rate,用相同的learning rate很难达到最低点。如果x1和x2有相同的scale的话,loss在参数w1、w2平面上的投影就是一个正圆形,update参数会比较容易。
而且gradient descent的每次update并不都是向着最低点走的,每次update的方向是顺着等高线的方向(梯度gradient下降的方向),而不是径直走向最低点;但是当经过对input的scale使loss的投影是一个正圆的话,不管在这个区域的哪一个点,它都会向着圆心走。因此feature scaling对参数update的效率是有帮助的
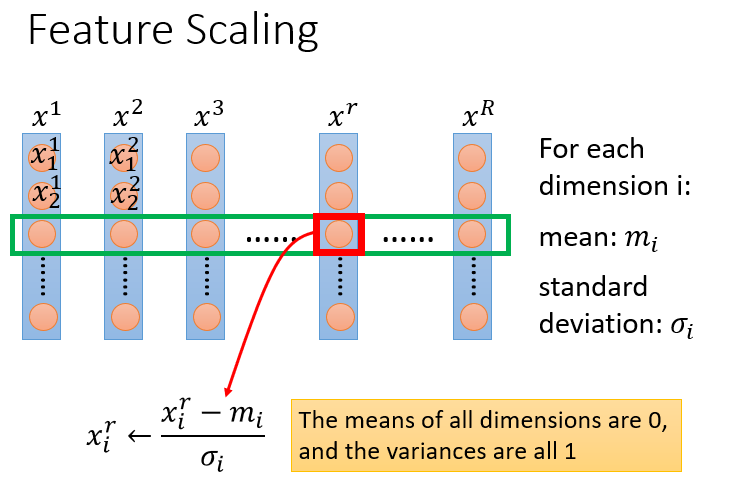
如何做feature scaling
假设有R个example(上标i表示第i个样本点),$x^1,x^2,x^3,…,x^r,…x^R$,每一个example,它里面都有一组feature(下标j表示该样本点的第j个特征)
对每一个feature (demension) i,都去算出它的平均值mean=$m_i$,以及标准差standard deviation=$\sigma_i$
对第r个example的第i个feature的值,减掉均值,除以标准差,即:
2.Gradient Descent Theory
考虑当用梯度下降解决问题:
每次更新参数 $\theta$,都得到一个新的$ \theta$,它都使得损失函数更小。即:
上述结论正确吗?其实是不正确的,我们并不能每次更新$\theta$,都能使损失函数更小。那么如何更新$\theta$才能使损失函数更小呢。
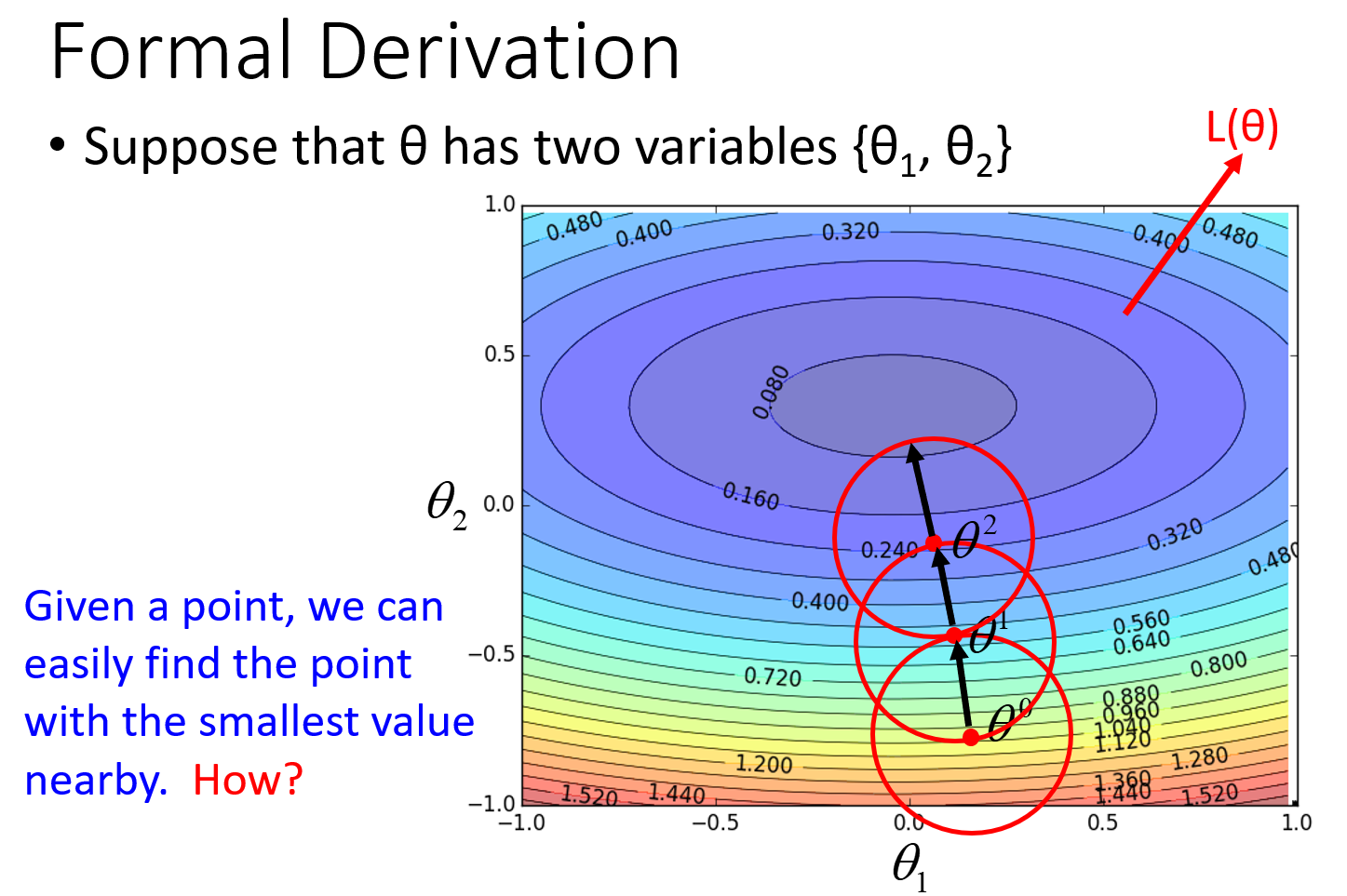
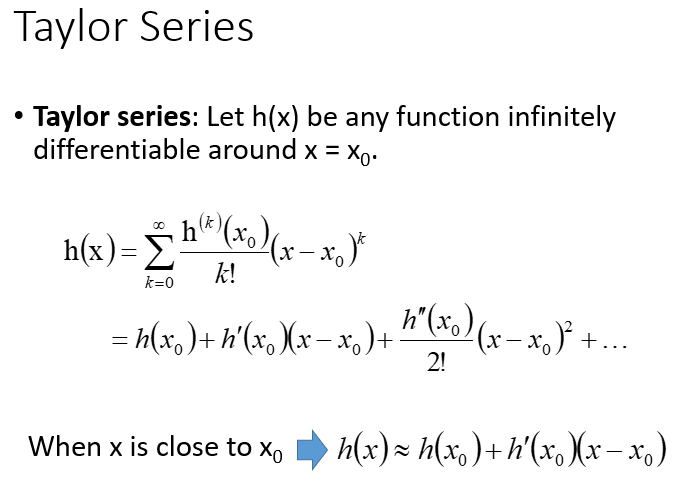
比如在$\theta^0$ 处,可以在一个小范围的圆圈内找到使损失函数最小的$\theta^1$,不断的这样去寻找。接着就考虑如何在这样一个小圆圈中寻找到$\theta^1$。这里就需要引入泰勒展开式(高数里都有讲啦)。
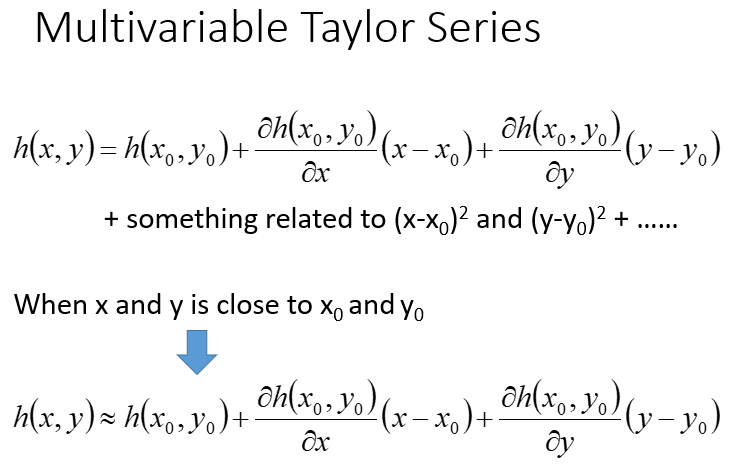
回到刚才的问题上,我们将点(a,b)附件的小圆内的损失函数在点(a,b)处展开:
令
则
设红色圆圈的半径为d,则有限制条件:
求$L(\theta)_{min}$,这里有个小技巧,把$L(\theta)$转化为两个向量的乘积:
显然,当向量$(\theta_1-a,\theta_2-b)$与向量$(u,v)$反向,且刚好到达red circle的边缘时(用$\eta$去控制向量的长度),$L(\theta)$最小。
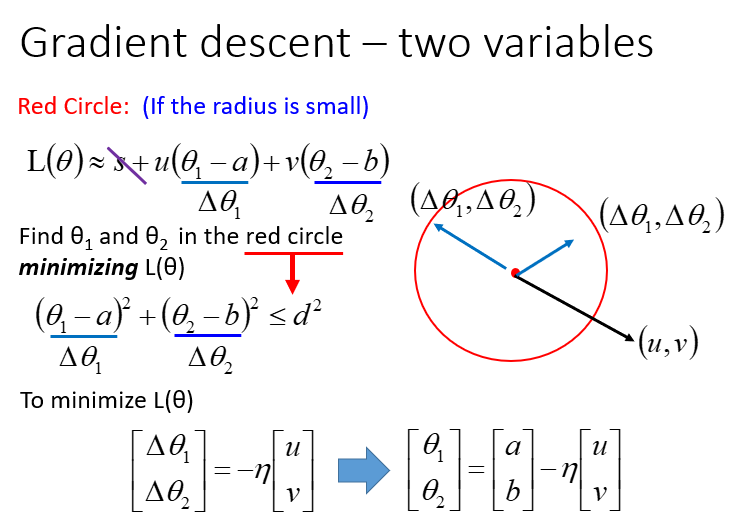
于是$L(\theta)$局部最小值对应的参数为中心点减去gradient的加权:
这就是gradient descent在数学上的推导,注意它的重要前提是,设定的红色圈圈的范围要足够小,这样泰勒展开给我们的近似才会精确,而$\eta$的值是与圆的半径成正比的,因此理论上learning rate要无穷小才能够保证每次gradient descent在update参数之后的loss会越来越小。于是当learning rate没有设置好,泰勒近似不成立,就有可能使gradient descent过程中的loss没有越来越小
当然泰勒展开可以使用二阶、三阶乃至更高阶的展开,但这样会使得运算量大大增加,反而降低了运行效率。
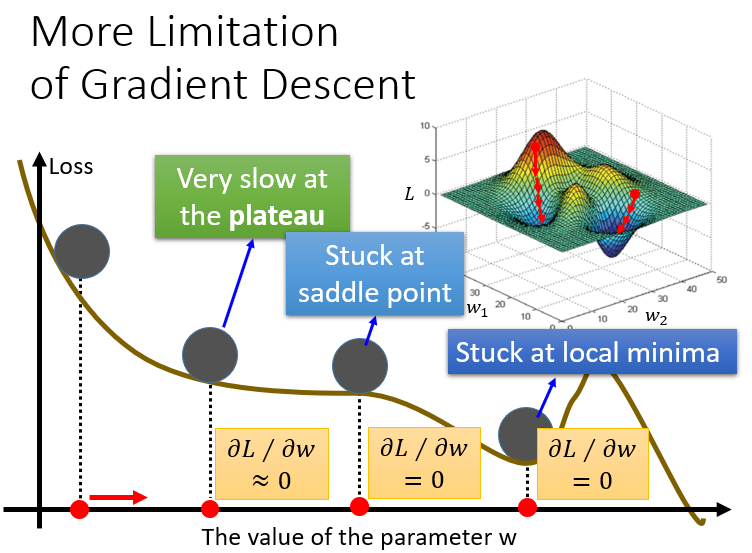
3.More Limitation of Gradient Descent
之前已经讨论过,gradient descent有一个问题是它会停在local minima的地方就停止update了。事实上还有一个问题是,微分值是0的地方并不是只有local minima,settle point (鞍点)的微分值也是0。以上都是理论上的探讨,到了实践的时候,其实当gradient的值接近于0的时候,我们就已经把它停下来了,但是微分值很小,不见得就是很接近local minima,也有可能是在一个鞍点上。还有个限制就是在”坡度“小的区域update得很慢。总结一下就是下面三点:
- Very slow at the plateau
- Stuck at saddle point
- Stuck at local minima